موقعیت یابی
موقعیت یابی یا مکان یابی یکی از مهمترین و کارآمدترین سرویسها در کاربردهای مختلف است. در واقع در بسیاری از کاربردها مانند شهر هوشمند، صنعت هوشمند، حمل و نقل هوشمند دریافت اطلاعات یک خودرو، افراد، اشیا یا کالاها بدون دانستن موقعیت آنها بی ارزش میباشد. بنابراین لازم است که با مکانیزمی از موقعیت آنها اطلاع داشته باشیم. این مکانیزم که تعیین مختصات فیزیکی هر چیزی است، موقعیت یابی یا مکان یابی نامیده میشود. روشهای مختلفی جهت تعیین موقعیت مکانی اشیا وجود دارد.
بطور کلی با توجه به محل و موقعیت قرارگیری اشیاء موقعیت یابی به دو دسته ی موقعیت یابی در محیط داخلی (سرپوشیده) و محیط بیرونی (رو باز) تقسیم می شود.
موقعیت یابی محیط های بیرونی
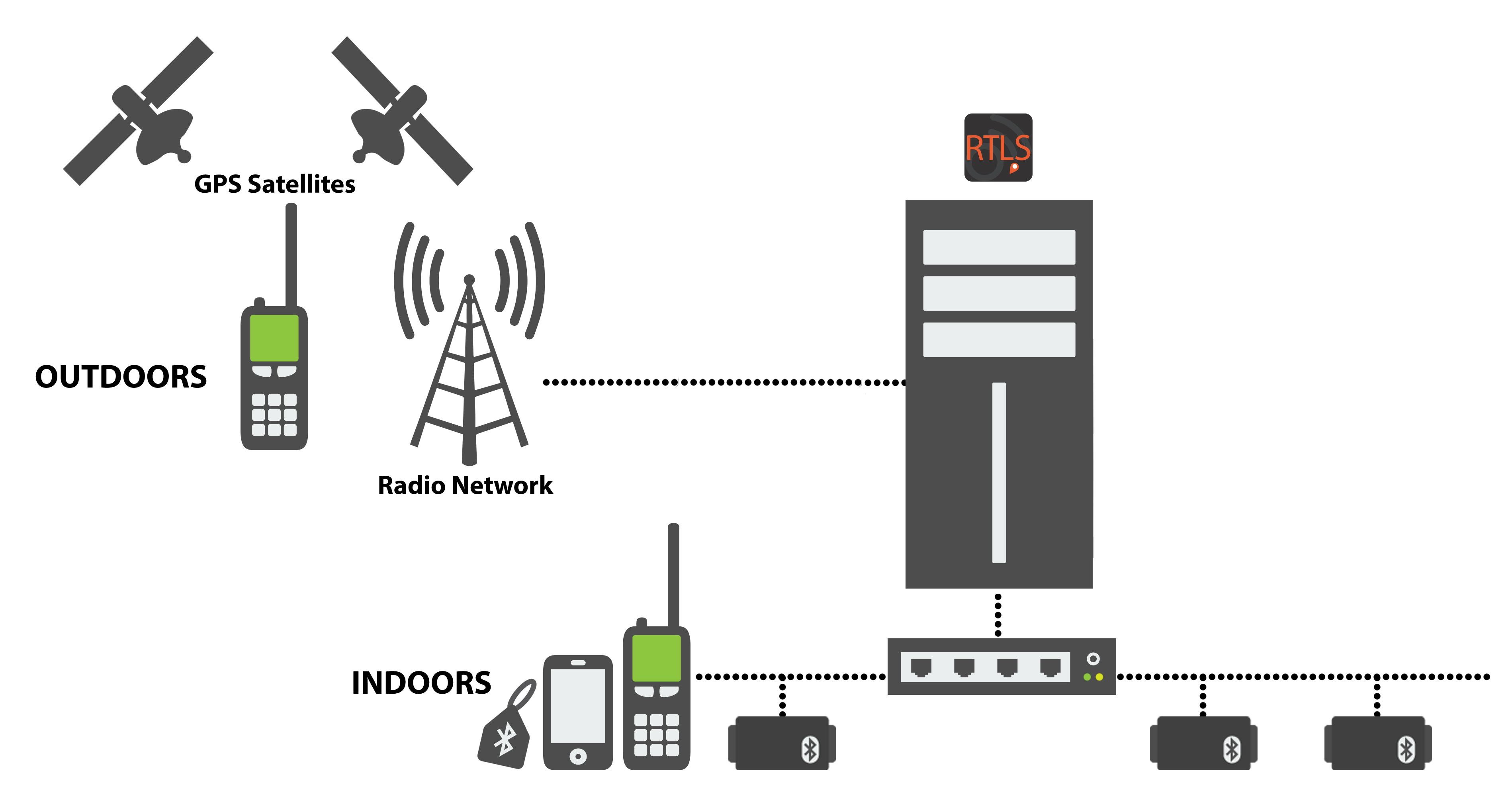
از فناوری های مورد استفاده در محیط های بیرونی (روباز) می توان به سیستم موقعیت یابی جهانی ( GPS) اشاره کرد که در بسیاری از تجهیزات و دستگاه های متحرک نظیر خودروها، هواپیما ها و کشتی ها استفاده می شود. ما نیز به سادگی از گوگل مپ، ویز و دیگر اپلیکیشن ها برای موقعیت یابی و مسیریابی در محیط های بیرونی استفاده می کنیم. اما سیستم های مکانیابی بیرونی تنها در محیط های خارج از ساختمان ها و به اصطلاح روباز کاربرد دارند و سیگنالهای GPS در محیط های داخلی و سرپوشیده دارای دقت بسیار پایین هستند و عملا کاریی لازم را ندارند.
موقعیت یابی محیط های داخلی
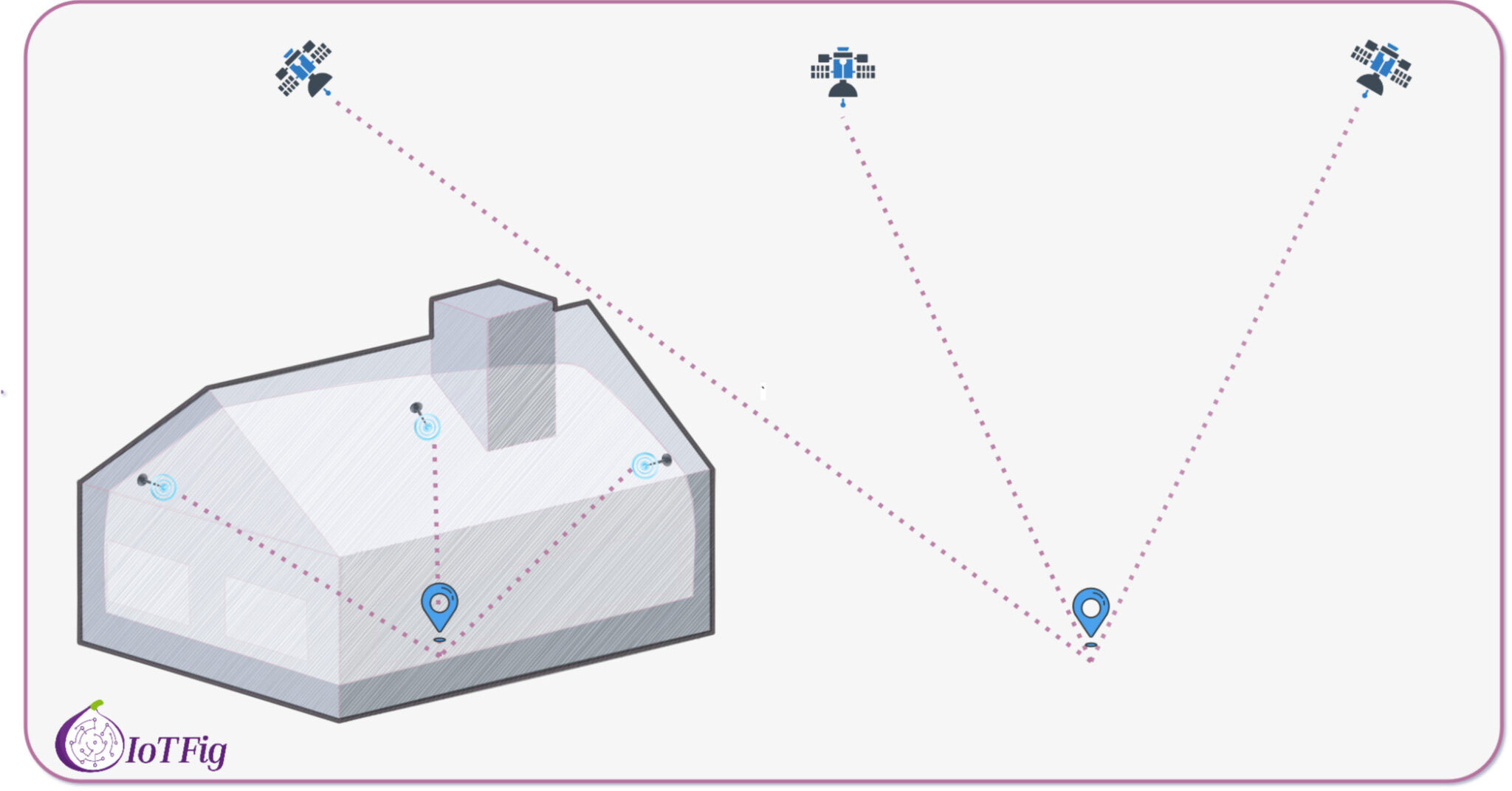
برای تعیین موقعیت اشیاء و افراد در محیط های داخلی نظیر انبارها، ادارات و فروشگاه ها نیازمند سیستم هایی مختص به این نواحی هستیم. در سیستم های موقعیت یابی داخلی (IPS) از ساختار GPS الهام گرفته شده با این تفاوت که در اینجا امکان دسترسی به سیگنالهای GPS را نداریم، لذا از گره ها یا نودهایی (node) به عنوان گره های راهنما یا مرجع استفاده می شود. این گره ها که از موقعیت و مکان خود آگاه هستند اغلب تحت عنوان بیکن (Beacon) یا انکر (Anchor) شناخته می شوند.
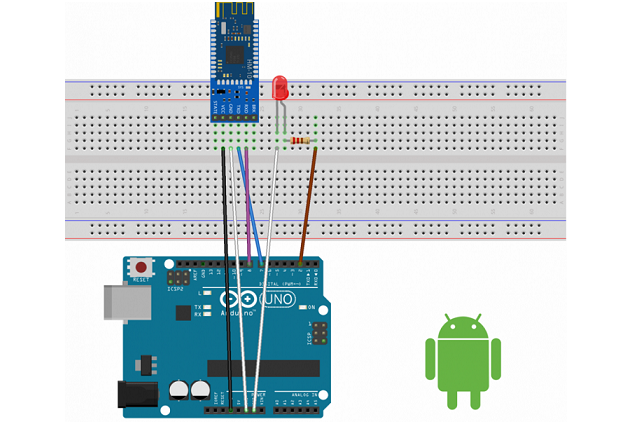
بنابراین برای اجرای یک سیستم موقعیت یابی یا ردیابی داخلی کافیست ابتدا با قرار دادن انکرها یا همان گره های مرجع در مکانهای مناسب در داخل ساختمانها، محیط های داخلی را تحت پوشش سیگنالهای موقعیت یابی قرار دهیم. سپس با تجهیز کردن اشیا ثابت / متحرک و یا افراد به تگها یا سنسورهای بسیار کوچک می توانیم موقعیت آنها را بدست آوریم و آنها را رهگیری کنیم.
انواع روشهای موقعیت یابی
دسته بندی های مختلفی برای روشهای مکانیابی یا موقعیت یابی ارائه شده است. مهمترین آنها در زیر بصورت مختصر توضیح داده می شوند.
1– روشهای موقعیت یابی مبتنی بر مرجع و غیرمبتنی بر مرجع
در روشهای مبتنی بر مرجع تعدادی گره مرجع در محیط توزیع می شوند. هدف از توزیع گره های مرجع آن است که درنهایت تمامی سنسورها، موقعیت تقریبی خود را در سیستم هماهنگی عمومی بیابد. در حالی که در روش غیر مبتنی بر مرجع، موقعیت تخمینی هر گره، مختصات آن در نقشه نسبی خواهد بود. البته در روش های غیرمبتنی بر مرجع می توان در نهایت به برخی از گره ها نقش گره مرجع را محول نمود. به این ترتیب که مختصات آنها را در سیستم مختصات عمومی مشخص نماییم. سپس به کمک این گره های مرجع، نقشه نسبی حاصل، به آسانی قابل تبدیل به نقشه عمومی خواهد بود.
با توجه به اینکه در هر دو روش ممکن است از گره های مرجع استفاده شود می توان تفاوت این دو روش را به بیان واضح تر چنین مطرح نمود که روش مبتنی بر مرجع عملیات موقعیت یابی خود را از گره های مرجع شروع می کند و گره های مرجع نقش اصلی را در روند موقعیت یابی به عهده دارند. در حالی که روشهاي غیر مبتنی بر مرجع میتوانند در مراحل پایانی الگوریتم، به منظور تبدیل مختصات نسبی به مختصات مطلق از گره هاي مرجع استفاده کنند.
دسته بزرگی از روش های مکانیابی مبتنی بر مرجع یک مدل سه مرحله ای را دنبال می کنند که عبارت است از:
– تخمین فاصله یا زاویه
– تخمین موقعیت هر حسگر
– بهینه سازی موقعیت های تخمینی حسگرها
2– موقعیت یابی متمرکز و موقعیت یابی توزیع شده
در این الگوریتمها، اطلاعات جمع آوری شده توسط گره ها جهت پردازش و محاسبه موقعیت آنها به یک پایگاه مرکزی ارسال می شود. حسن این روش تطابق آن با محدودیت محاسباتی گره ها در محیط است. ولی ایراد آن وجود سربار زیاد ارتباطی است که آن را برای کاربردهایی که دارای تعداد زیادی گره های متحرک هستند، نامناسب می کند.
در الگوریتمهای توزیع شده، هر گره خودش با استفاده از اطلاعاتی که از ارتباط با گره های مرجع به دست آورده است، اقدام به محاسبه موقعیت خود می کند. حسن این روش مقیاس پذیری بالای آن و نیاز به ارتباطات کمتر در شبکه است.
3– موقعیت یابی چند گامی و تک گامی
در روشهاي موقعیت یابی چند گامی هر حسگر برای تعیین مکان خود، لزوماً با گره مرجع در ارتباط مستقیم نمی باشد. در این حالت حسگرهای راه دور از طریق چندین گره میانی با مرجع ارتباط دارند. در این روش موقعیت یابی، حسگرهایی که به مراجع نزدیکتر هستند، متحمل بار ترافیکی بیشتري میشوند. زیرا در مسیر ارتباطی سایر گره ها با گره مراجع واقع شده اند.
در روشهاي چند گامي به دلیل ارتباط گام به گام گره هاي حسـگر بـا گـره هـاي مرجـع، پدیده انباشتگی خطا قابل وقوع است.
در روشهاي موقعیت یابی تک گامی، گره حسگر دریافت کننده سرویس موقعیت یابی در ارتباط مستقیم با گره مرجع مـی باشـد. در این حالت گره هائی که در فواصل دور از مرجع قرار دارند، باید انرژي بيشتري را براي ارتبـاط بـا مرجـع متحمل شوند. ویژگی ارتباط مستقیم با گرههاي مرجع مانع از انباشتگی خطا در روش تک گامه میشود.
4– موقعیت یابی مبتنی بر محدوده و غیر مبتنی بر محدوده
در روش موقعیت یابی مبتنی بر محدوده یا رنج از تکنیکهای مختلف اندازه گيري براي تخمین فاصله بین گره ها استفاده میشود. نظیر اندازه گیری شدت سیگنال دریافتی (RSSI)، زمان دریافت سیگنال (ToA) و غیره. این روشها با توجه به استفاده از تجهیزات اندازه گیری، مکان گره ها را با دقت نسبتاً بالایی تخمین میزنند. امـا هزینـه ناشـی از بـه کـارگیري تجهیزات اندازهگیري در همه گره ها هزینه قابل توجهی را به سیستم تحمیل میکند.
روشهاي غیرمبتنی بر محدوده که از اطلاعات اتصالات گراف توپولوژي متناظر با شبکه براي موقعیت یابی استفاده میکنند. روشهاي غیرمبتنی بر محدوده به دلیل عدم استفاده از تجهیزات اندازهگیري، به لحاظ هزینـه سـخت افزاري مقرون به صرفه تر از روشهاي مبتنی بر محدوده هستند، اما نسبت به این روشها دقت كمتري دارند.
متداول ترین الگوریتمهای مبتنی بر رنج که براساس روشهای اندازه گیری فاصله و زاویه هستند، در زیر بصورت مختصر توضیح داده می شود.
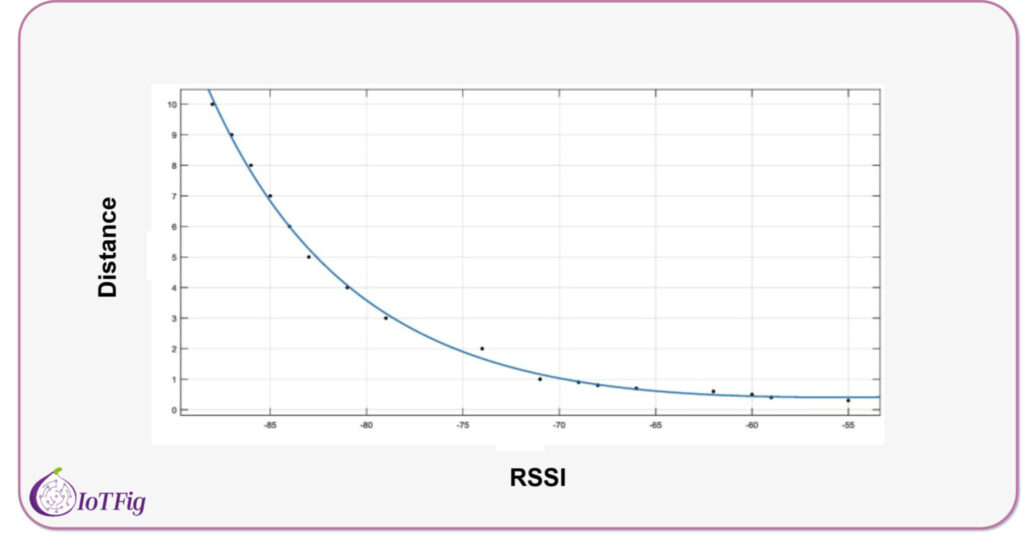
– روش شدت سیگنال دریافتی (RSSI)
در این روش قدرت سیگنال دریافتی اندازه گیری شده و با توجه به قدرت انتقال و افت انتشـار مـؤثر بـه فاصله ترجمه می شود. بنابراین دریافت کننده سیگنال باید از افت انتشار مؤثر در نقطـه شـروع انتقال سیگنال آگاهی داشته باشد. روش تخمین بیشترین احتمال از طریـق حداقل نمودن اخـتلاف فواصل اندازه گیری شده و تخمینی، موقعیت هدف را تعیین میکند. این روش تنها نیازمند RF بوده و براي شبکه هاي بیسیم مناسب است. در این روش به دلیل وابستگی زیاد به محیط و وجود نویزهای محیطی، استفاده از فیلترهای مناسب جهت کاهش نویز ضروری است.
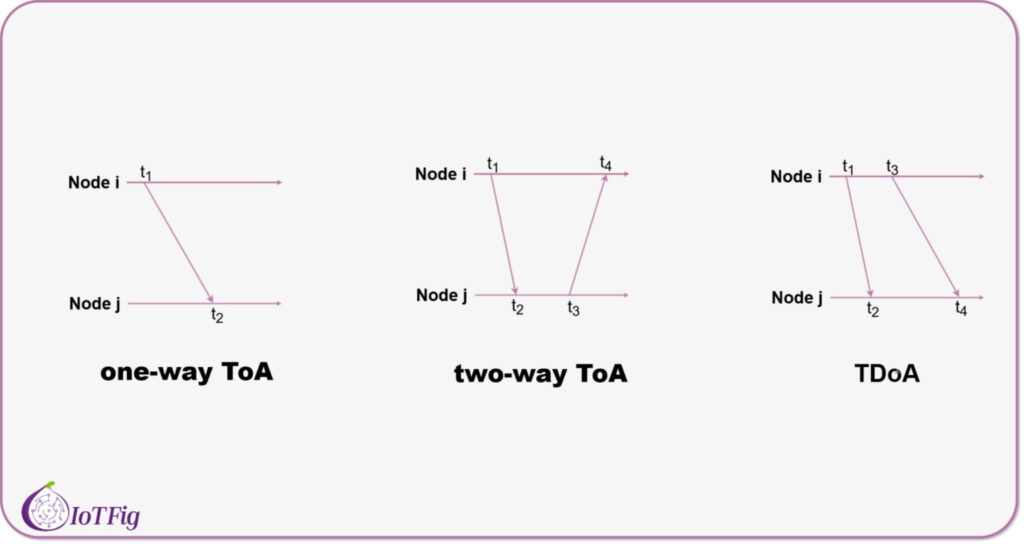
– روش زمان دریافت سیگنال (ToA) و اختلاف زمان دریافت سیگنالهای (TDoA)
فاصله گره با توجه به زمان انتشار و سرعت انتشار سیگنال به دست می آیـد. در روش ToA زمان دریافت ماوراي صوت را اندازهگیری میکند. اما این روش نیاز به همزمانی بین ارسال کننده ها و دریافت کننده ها دارد. در روش TDoA نیاز به دو نوع سیگنال و اندازه گیری تفاوت زمان دریافت دو نوع سیگنال دارد. در ایـن روش تنوعی از سیگنالها نظیر سیگنالهای RF ، صوتی، مادون قرمز و ماوراي صوت قابل بکارگیری است. این روشها داراي دقت بالایی هستند، هرچند اضافه نمودن هر تجهیز به گره روي هزینـه و انرژي تأثیر میگذارد.
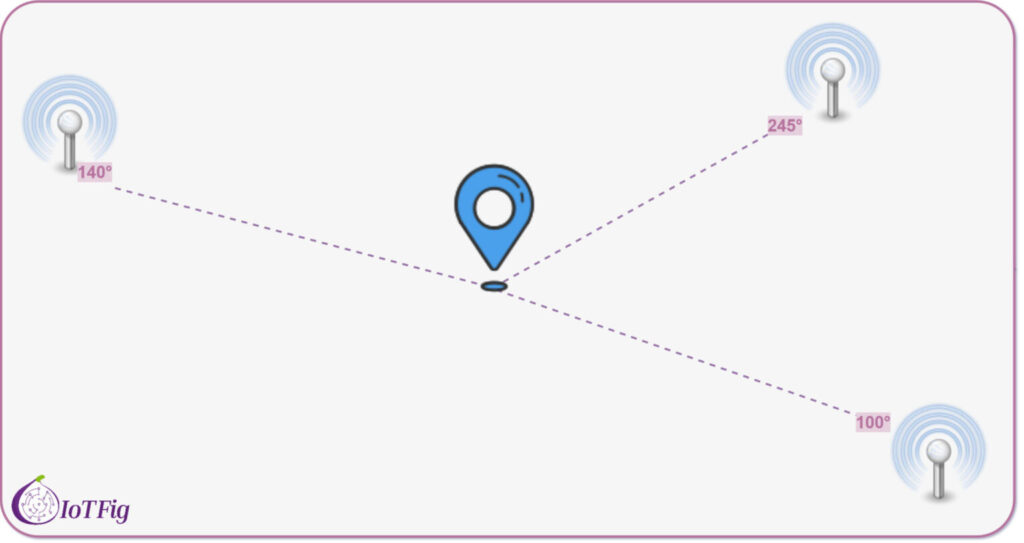
– روش زاویه دریافت سیگنال (AoA)
در این روش زاویه دریافت سیگنال تخمین زده شده و از ارتباطات هندسی ساده براي محاسبه موقعیت گره ها استفاده می شود. در واقع گره های دریافت کننده سیگنال مجهز به حسگر زاویه سنج می باشند که از محل تلاقی آنها مکان گره موردنظر مشخص می گردد و برای اینکار تنها احتیاج به دریافت دو سیگنال گیرنده دارد. یکی از معایب این روش نیاز به بکارگیري آنتن مخصوص است.